PDF形式の資料を閲覧するにはAdobe Acrobat Readerが必要です。
- Adobe Acrobat Readerをダウンロードする

2020年11月16日
国立大学法人北海道大学
岩見沢市
日本電信電話株式会社
東日本電信電話株式会社
株式会社NTTドコモ
国立大学法人北海道大学(本部:北海道札幌市、総長:寳金 清博、以下、「北大」)、岩見沢市(本部:北海道岩見沢市、市長:松野 哲、以下、「岩見沢市」)、日本電信電話株式会社(本社:東京都千代田区、代表取締役社長:澤田 純、以下「NTT」)、 東日本電信電話株式会社(本社:東京都新宿区、代表取締役:井上 福造、以下「NTT東日本」)、株式会社NTTドコモ(本社:東京都千代田区、代表取締役:吉澤 和弘、以下「NTTドコモ)は、最先端のロボット農業技術に、第5世代移動通信方式(5G)、革新的ネットワーク技IOWN(注1)を実現する技術の一つである複数ネットワーク最適活用技術や高精度な測位技術等を用いて、農機完全自動走行(注2)に向け、通信や映像の途切れを防止する等、安定的で円滑な農機の広域自動走行とその遠隔監視制御を実現しました。
<実証実験動画>
https://youtu.be/rwai5BjUXcs日本の農業は長期にわたる就農人口の減少や高齢化等による人手不足が続いています。また、昨今の新型コロナウイルス感染拡大の影響により、外国人技能実習生が減少する等、農業現場の労働力減少に拍車がかかっています。このような状況において、日本の農業を維持、発展させるためには、農家当たりの耕作面積地拡大等につながる飛躍的な生産性向上が求められますが、農家自身の努力だけで実現するには限界があります。そのため、ロボット農機等を活用して、農作業を可能な限り自動化することにより、直面する人手不足を解消することが期待されています。
このような背景のもと、北大、岩見沢市、NTT、NTT東日本、NTTドコモは2019年6月28日に産官学連携協定を締結し、最先端の農業ロボット技術と情報通信技術の活用による世界トップレベルのスマート農業およびサステイナブルなスマートアグリシティの実現に向けた研究、技術開発等を進めてきました。
これまで、農機からの高精細映像や監視センタからの発進・停止等の制御信号の安定的な伝送をめざし、5G等の高速・大容量・低遅延のネットワークを活用して実証を進めてきました。しかし農機完全自動走行対応には圃場間での移動も含め、遠隔地からトラクタやコンバイン等の農機をモニター等で監視、制御することが必要となります。
例えば、対象の農地が5Gのサービスエリア外であったり、その無線通信の特性上、遮蔽等の影響を受けて自動運転農機が必要な通信品質を得られなかった場合、遠隔地にある監視センタへ送信する監視映像が乱れたり、途切れたりすることにより遠隔監視の継続的・安定的な実施が難しい等の課題があり、その解決策として、複数のネットワークを安定的に切り替えるなどの対策が有効です。
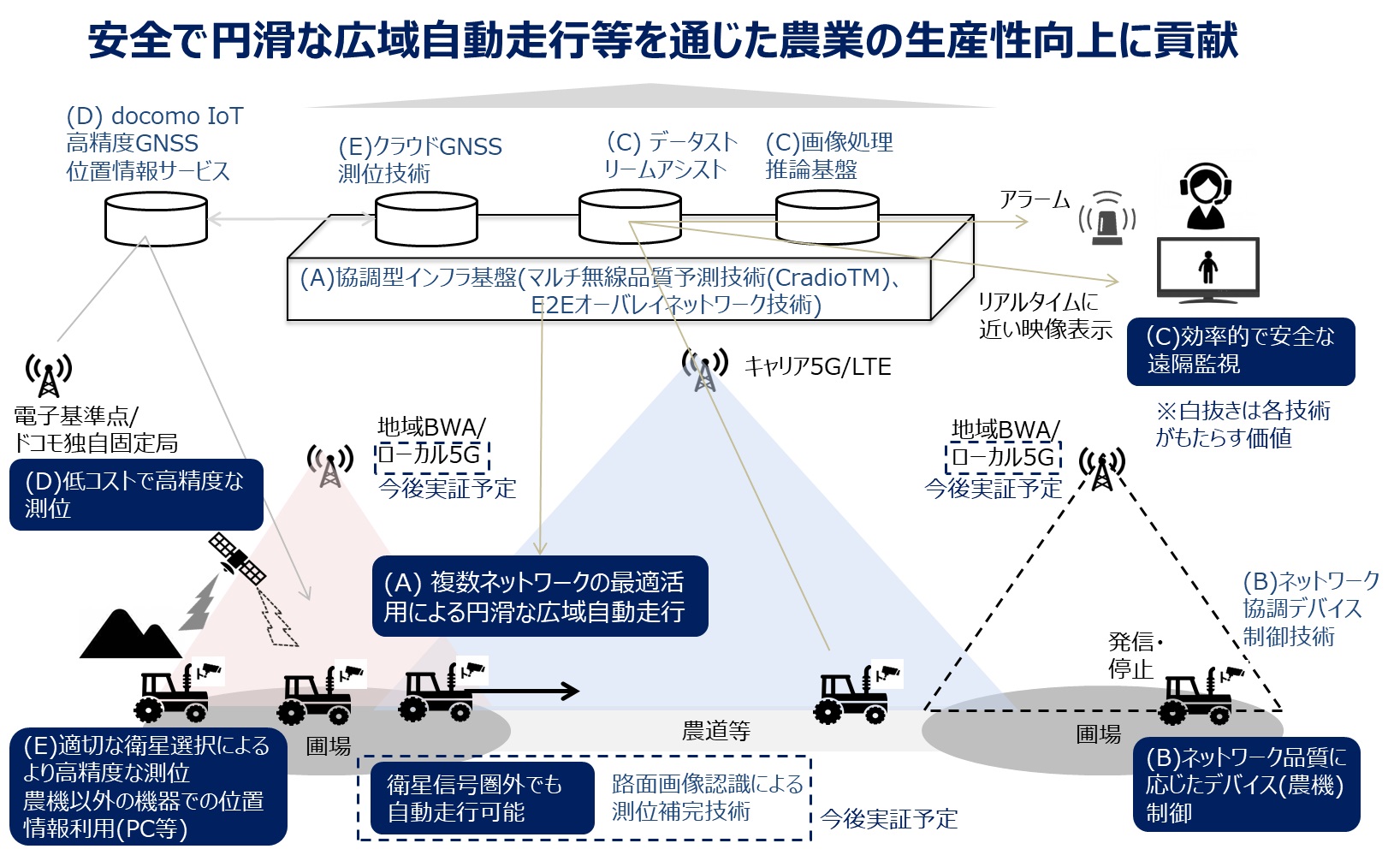
そこで、今回の実証では、以下5つの技術を実現し、その有効性を確認しました(図1)。
まず、(A)IOWNを実現する技術の一つとなる協調型インフラ基盤技術(マルチ無線品質予測技術(CradioTM)(注3)、E2Eオーバレイネットワーク技術)を用いて、複数のネットワークを跨って農機が自動走行する中で、通信品質の変動をAIが予測して通信品質が劣化する前に適切なネットワークに自動で切り替えることで、遠隔監視を中断させることの無い、安定的な自動走行を実現しました。岩見沢市の農道で実際に農機を自動走行させ、同技術を用いて通信を中断させず自動でのネットワーク切り替えに成功した実証結果を図2に示します。これらの技術は、アプリケーションに利用ネットワークを意識させない、ナチュラルな利用を可能とする、将来の移動固定融合サービスにつながる技術の1つとしても位置づけられます。
また、(B)ネットワーク協調デバイス制御技術を用いて、ネットワークの品質変化に応じた農機の制御指示を実現し、監視映像が伝送できないレベルにネットワーク品質が劣化した際に、自動でトラクタを安全に停止させるなど、その有効性を確認しました。
さらに、(C)監視拠点で映像をパケットレベルで低遅延に複製することでネットワーク負荷を低減しながら,遠隔監視と画像解析などの複数の用途でのリアルタイム映像の同時利用を可能とするデータストリームアシスト技術、また、深層学習では、サーバ収容率を高めるために、複数の映像ストリームを効率的に処理するストリームマージ機能やCPUやGPUなど様々なリソースを最適化する推論処理基盤技術により、処理を効率化しています。これらの機能により監視者の負担軽減につながる効率的な遠隔監視を実現し、その有効性を確認しました(以上、図3)。
また、農機が自動走行するためには、高精度な測位が必要です。そのため、衛星信号を受信する固定局を農機の周辺環境に設置し、固定局から位置補正情報を配信することが求められます。従来は、農家が当該固定局を設置することから、費用面や運用面で農家の負担となる等の課題がありました。
そこで、(D)農家による固定局の設置が不要となる、「docomo IoT高精度GNSS(注5)位置情報サービス」(注6)を用いた農機自動走行の実証を行い、高精度の測位を実現し、有効性を確認しました。これにより、低コストで高精度な測位情報の利用が可能となります。
さらに、(E)IOWNを実現する技術の一つであるクラウドGNSS測位技術を用いた農機の自動走行の実証も行いました。農機に搭載した受信機で受信されたGNSS信号と固定局からの位置補正情報を使用して、クラウド上で測位演算処理を行い、リアルタイムの測位結果を農機の自動走行の制御に使用することで、その有効性を確認しました(図4)。
クラウド上で測位の演算処理を行うことで、農機のみならず、PCやタブレット等の機器でも同時に位置情報の利用が可能になること、また、樹木などの障害物が圃場周辺にある環境下で、利用にふさわしくない衛星信号を測位処理に利用して測位精度が劣化する課題に対しても、クラウド上の潤沢な計算リソースを使い、適切な衛星信号を選択することで高精度な測位を実現することが可能となります。
図1.実証全体概要図
今後は、農機自動走行の安全性をさらに高めるため、衛星信号を用いた測位可能なエリア圏外でも農機自動走行を可能にする路面画像認識による測位補完技術(図5)の実証も行います。
また、ドローンや草刈・収穫ロボット等農機以外への遠隔監視制御対象の拡大や5Gや現行光ネットワークよりもさらに高速・大容量・低遅延なIOWN関連技術の導入を通じた、より多数の農機の遠隔監視制御、より広域での農業の自動化をめざします。
さらには、農業の生産分野にとどまらず、流通・販売・消費分野にまたがるフードバリューチェーンへと取り組みを拡大させるとともに、そこで構築した通信インフラを防災や健康等他分野での活用に広げる等、スマート農業を軸とした、生活に必要なさまざまなサービスのスマート化へとつながるスマートアグリシティの実現をめざします。
上記の取り組みに加え、産官学連携のメンバが主体となり、新たに農機メーカのクボタや日立ソリューションズ、スマートリンク北海道等も加わったコンソーシアムを組成し、総務省の「地域課題解決型ローカル5G(注7)等の実現に向けた開発実証等」、農林水産省の「スマート農業実証プロジェクト(ローカル5G)」事業も進めることにより取り組みを融合・深化させ、農業分野の課題解決、競争力強化に貢献してまいります。
なお、本技術については、11月17日から20日に開催されるNTT R&Dフォーラム2020 Connectにて紹介します。
<NTT R&Dフォーラム2020 Connect> https://www.rd.ntt/forum/![]()
報道発表資料に記載している情報は、発表日時点のものです。
現時点では、発表日時点での情報と異なる場合がありますので、あらかじめご了承いただくとともに、ご注意をお願いいたします。