【別紙1】
| 参画企業 | 担当概要 |
|---|---|
| 北海道大 |
|
| 岩見沢 |
|
| NTT |
|
| NTT東日本 |
|
| NTTドコモ |
|
図2.複数のネットワークを跨る農機自動走行の実証結果
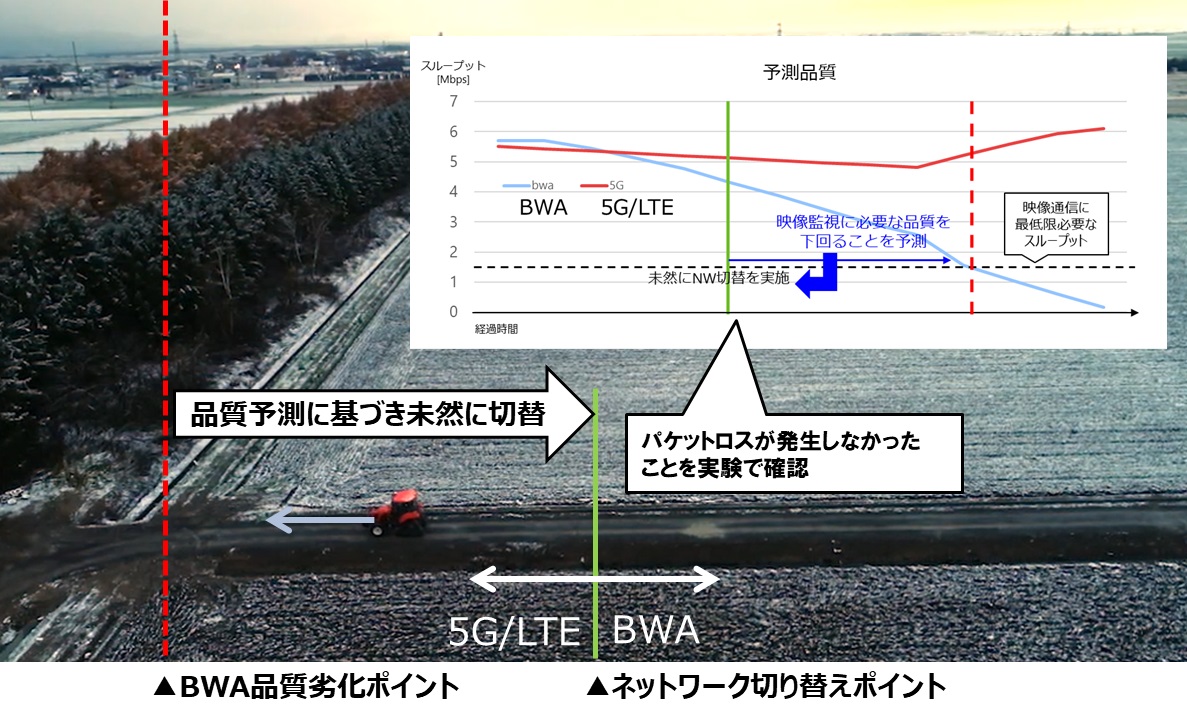
図3.IOWN(ネットワーク系技術)関連技術を用いた実証内容
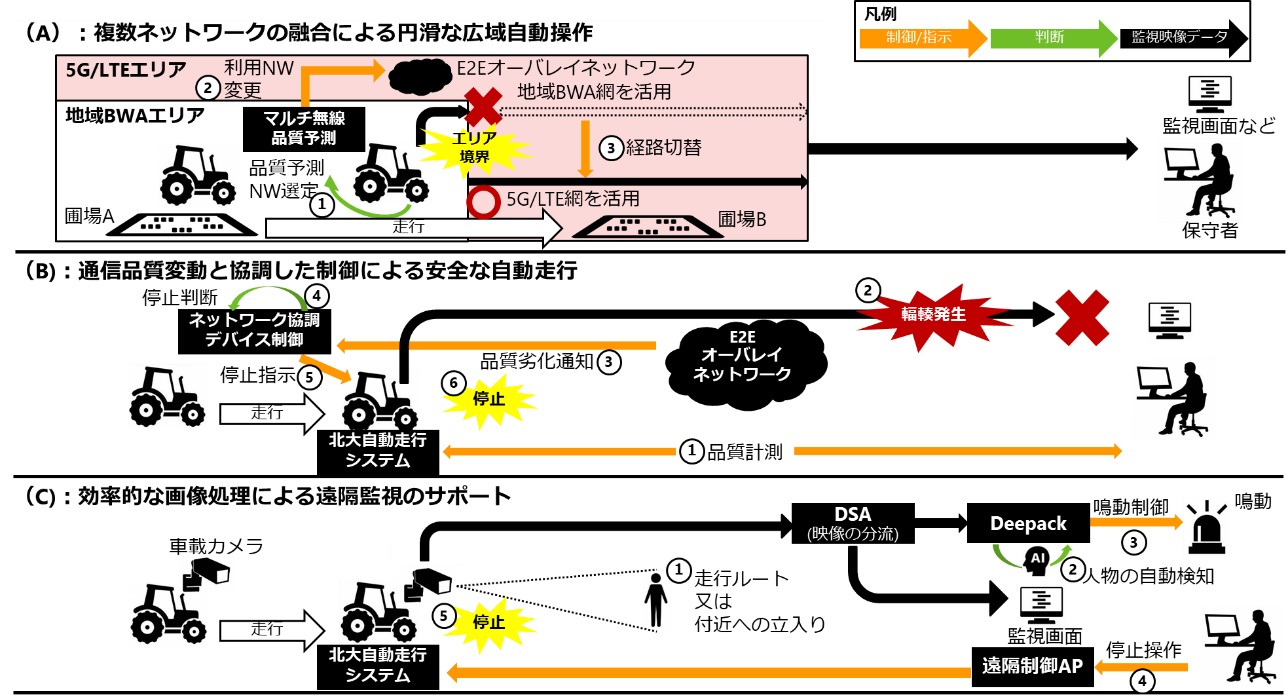
図4.IOWN(クラウドGNSS測位技術)関連技術を用いた実証内容
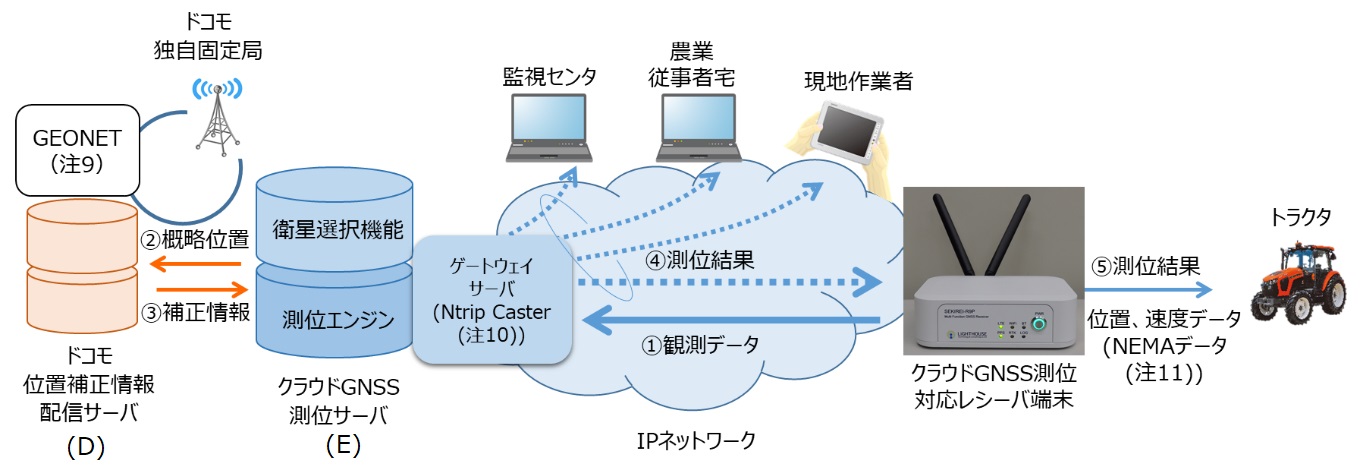
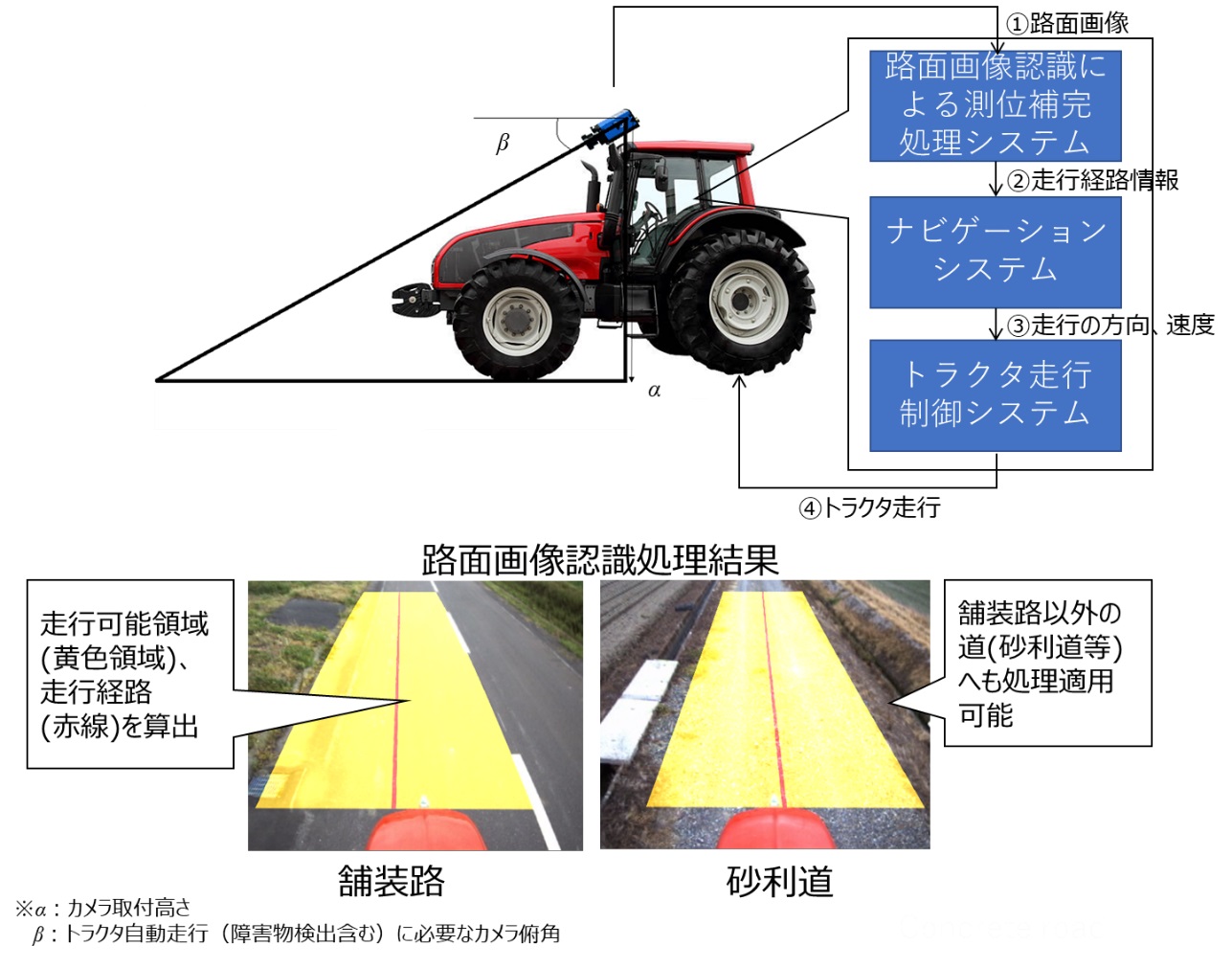
図5.路面画像による位置推定概要(北大)
(注1)
NTTが現在検討している光ベースの革新的なネットワークの構想IOWN(アイオン)「Innovative Optical & Wireless Network」
URL:http://www.ntt.co.jp/news2019/1905/190509b.html![]()
(注2)
無人状態での完全自動走行。使用者はモニター等により、ロボット農機の遠隔監視を行う
(注3)
マルチ無線プロアクティブ制御技術(群)。複数の技術からなるIOWNの構成技術。本実証では品質予測技術を適用。
URL:https://www.rd.ntt/iown/0004.html![]()
広帯域移動無線アクセスシステム(Broadband Wireless Access)
(注5)
Global Navigation Satellite System(全球測位衛星システム):GPSなどの衛星測位システムの総称
(注6)
NTTドコモの誤差数センチメートルの高精度測位を提供可能とするサービス
(注7)
地域の様々な主体が自らの建物や敷地内でスポット的に柔軟にネットワークを構築できる5Gシステム
(注8)
NTT東日本が提供するAI・IoT技術の実証環境。産官学連携による新たな社会課題解決・事業共創をめざす場
(注9)
GEONET(GNSS Earth Observation Network System):全国約1,300ヶ所に設置された電子基準点と中央局からなる、高密度かつ高精度な測量網の構築と広域の地殻変動の監視を目的としたGNSS連続観測システム
(注10)
Ntrip(Networked Transport of RTCM via Internet Protocol):GNSSレシーバ
観測データや測位結果をIP網で転送するためのHTTPベースのプロトコル Ntrip Casterはゲートウェイサーバ装置
(注11)
NEMA:米国海洋電子機器協会(National Marine Electronics Association)が規定するシリアル通信およびアプリケーションレイヤプロトコル 正式名称はNMEA0183